Research
Exploring the frontiers of autonomous systems.
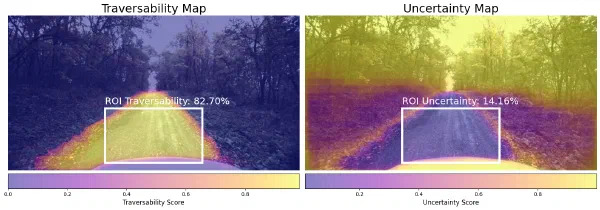
AnyTraverse: VLM-Based Traversability Framework with Human-in-the-Loop
Off-road traversability segmentation enables autonomous navigation with applications in search-and-rescue, military operations, wildlife exploration, and agriculture. Current frameworks struggle due to significant variations in unstructured environments and uncertain scene changes, and are not adaptive to be used for different robot types. We present AnyTraverse, a framework combining natural language-based prompts with human-operator assistance to determine navigable regions for diverse robotic vehicles. The system segments scenes for a given set of prompts and calls the operator only when encountering previously unexplored scenery or unknown class not part of the prompt in its region-of-interest, thus reducing active supervision load while adapting to varying outdoor scenes. Our zero-shot learning approach eliminates the need for extensive data collection or retraining. Our experimental validation includes testing on RELLIS-3D, Freiburg Forest, and RUGD datasets and demonstrate real-world deployment on multiple robot platforms. The results show that AnyTraverse performs better than GA-NAV and Off-seg while offering a vehicle-agnostic approach to off-road traversability that balances automation with targeted human supervision.
Deep Reinforcement Learning-Based Approach for a Single Vehicle Persistent Monitoring Problem with Fuel Constraints
This article presents a deep reinforcement learning-based approach to tackle a persistent monitoring mission requiring a single unmanned aerial vehicle initially stationed at a depot with fuel or time-of-flight constraints to repeatedly visit a set of targets with equal priority. The objective of the problem is to determine an optimal sequence of visits to the targets that minimizes the maximum time elapsed between successive visits to any target while ensuring that the vehicle never runs out of fuel or charge.
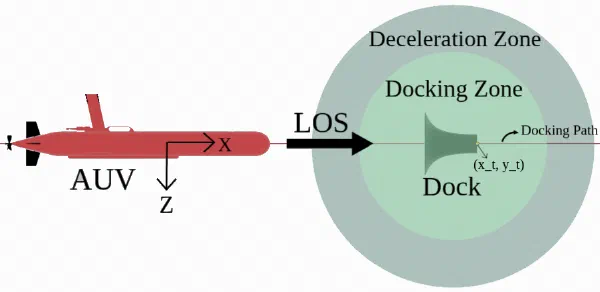
GNC for AUV Docking
Persistent underwater operations rely on Autonomous Underwater Vehicles (AUVs) to periodically offload data and recharge for extended mission endurance. Autonomous docking presents an effective solution for meeting these operational demands. However, successful docking requires the vehicle to approach the dock at a minimum relative speed to avoid physical damage, while taking the effects of varying ocean currents and vehicle buoyancy into account. In this paper, we pose the docking problem as a path-following problem and propose a novel Polynomial-Logarithmic Adaptive Trajectory (PLATO) law that dynamically prescribes the desired velocity to the AUV while meeting the relative speed constraints. The decoupling of the docking problem into path following and the velocity profile controller enables the generalization of the formulation to accommodate different combinations of path-following algorithms and velocity profile controllers. Simulation results validate the proposed approach, demonstrating its effectiveness across various path-following guidance laws and diverse current conditions.
Sim2Real Autonomous Driving using Convolutional Neural Network for Urban Environments
In this paper, we propose a model that utilizes input images from two forward-facing cameras, along with vehicle velocity and traffic light status to predict the future waypoints of the vehicle. Trained on expert demonstrations, the model learns to predict future waypoints in the vehicle frame of reference without access to BEV ground truths.